11.1 Introduction
In this book, I describe a system in terms of its parts and its structure. The system overall has a purpose, which can be described in terms of things it should do or properties it should have. The system meets this purpose by combining the parts together with the structure of how the parts interact. One should be able to show that the desired system behavior and properties follow from the combination of parts and structure.
In this chapter, I start by discussing components, the term I will use for parts. In the next chapter I will discuss structure, and how the combination of parts and structure leads to emergent properties that meet system needs.
Terms. I use the term “component” as a generic term for a part of the system. Some approaches use different terms, such as “element” or “item”. Other approaches use different terms depending on the level of encapsulation: system, subsystem, component, subcomponent, for example. I use the term “component” throughout, with “system” reserved for the system as a whole, and “subcomponent” used to denote a component that is part of another component.
11.2 Definition of component
A component is something that is part of a system and that people can think of as a unit. “Unit” implies some kind of singular aspect to the component: one purpose, one implementation, or one boundary, for example.
The unitary nature of a component means that the world can be divided into that which is within the component, that which is at the boundary, and that which is outside the component—its environment and the rest of the world.
This definition implies that different people will see different things as unitary components, often depending on the level of abstraction one wants to work with. One person may think of “the electrical storage system” as a unitary component, while another person may think of battery cells and power regulator chips as components, and the electrical storage system as a collection of components. Both views are correct, and both are useful at different times or for different people.
The focus on unitary purpose or boundary is a way to address complexity in a system. The focus is meant to help humans organize and understand the system they are working with by taking a divide-and-conquer approach. It means that some people can focus their attention solely on the component, making sure that it is designed and implemented to meet its purpose while not having to think about the rest of the system. The focused attention on the component must be complemented by attention on the system structure that connects the component to others, as described in the next chapter.
There are three related principles that can help identify what is a component and what is not. (Some of this is based on principles presented by Parnas [Parnas72].) These are only guides, and there are exceptions to each of them.
- Is there a singularity of purpose in the thing that might be a component?
- Is there stronger coupling or connectedness within the thing than across a boundary to the outside?
- Can the design or implementation of the thing be replaced by a different version without affecting other components in the system?
The goal of the first principle is to organize components around their purpose. If a thing has multiple purposes, that suggests that it might be divisible into smaller parts, each with a sharper focus, or that part of the thing might be better combined into something else with a similar purpose. On the other hand, if there is some feature that is implemented by more than one component, then those components are candidates to merge together. This is particularly true when those components contribute to some important emergent property (Section 12.4).
The second principle addresses how independent a thing is from other things. Independence can be viewed in terms of causal relationships with other components, as covered in the next chapter. The more tightly two things are related, the more they will have to be designed, implemented, and tested together; the less they are related, the more they can be worked on independently. If two things are strongly related, one should consider merging them into a single component; if they are loosely related, they can be more readily treated as separate components.
The final principle is also related to independence. If the design or implementation of a thing can be replaced with little or no effect on the design of the rest of the system, then that is evidence that the thing is independent and can be treated as a component. Having clear and narrow interfaces between the thing and the rest of the system is a sign that the component is independent. More broadly, replaceability is often an indication that something should be considered a separate component.
There is one additional indication that something should be treated as a component: when it is something that is usually sold or acquired as a unit. Electronic chips, antennas, motors, and batteries are all generally bought as units. Software packages are often acquired as units, whether bought or acquired as open source. A person hired as a contractor to fill a commonly-defined role can be seen as a component in a system.[1]
11.2.1 Component purpose
Every component has a purpose, which defines how that component contributes to the system as a whole. “Purpose” is a broad term, including behaviors that the component should have, properties it should exhibit, or functions it should provide. A component’s purpose is not necessarily defined precisely; sometimes, the purpose is a somewhat ambiguous prose statement of what a human wants the component to do or be. Turning that ambiguous statement of purpose into a precise and actionable definition is part of the engineering process. I discuss this in Chapters 33 and 34.
I discussed the purpose of the whole system in Chapter 9. The system purpose is the purpose for the top-level component in a hierarchy, which represents the whole system.
Most human-designed components have a single primary purpose or property, possibly with multiple secondary purposes. Consider a battery: its primary purpose is to store electrical energy and make it available to other parts of the system. The battery may have a number of secondary purposes, such as providing mechanical structural rigidity, providing thermal mass to help maintain a constant temperature in the system, or contributing to the location of the system center of mass.
Each component has a number of properties that derive from its purpose: its state and behaviors, the inputs and outputs it can provide, and constraints on how it should be used. The documentation of these properties provides an unambiguous and precise specification of the component.
People working on the component need to have the purpose (and the specification that derives from it) available as they do their work. This information guides how they design the component, and how they verify that a design or implementation meets its needs. It is important that all of the purpose is available to them in one place so that they know they are considering everything they need to consider, without hidden surprises they couldn’t find.
11.2.2 Limits of the component approach
Components help human engineering and understanding—but when humans aren’t doing the design, there are limits on how the approach applies.
Consider a mechanical structure designed with a generative design tool. The tool can take in a specification of what the structure should achieve—forces, attachment points, and so on—and will find a design that optimizes for given criteria such as weight or cost. These structures often do not resemble ones people design because the tool can explore a more complex design space than a person can, and as a result often produce substantially better results than the human designs. Such designs can also potentially co-optimize multiple functions, such as a mechanical structure that includes channels for coolant flow within the structure or that meets RF reflection properties. While a person could make such a design, generative tools can do so at far lower cost.
As a second example, consider a neural network trained to recognize elements in a visual scene. The neural network is designed by performing a training process that uses a large number of examples of the kind of recognition the system should perform. The resulting network is typically much more accurate than a manually-designed algorithm. However, it is difficult to investigate the network itself to determine how the connections in the network lead to accurate (or inaccurate) image recognition. It is difficult to look at a specific connection in the network and explain how it affects the result, or how changing that setting will change recognition properties.
Both these examples are components that will be part of a larger system. As components, they have a defined purpose, from which a specification can be derived defining what the component should do. From there, automated methods take over to produce the design (for the mechanical part) or directly produce the implementation (for the visual recognition component). If these components were designed by people, we would expect that we could review and understand the component’s design as a check on its correctness. As machine-generated components, however, we only verify that the design or the implementation complies with its specification.
There is one significant difference between the two examples: how they can be verified for compliance with their specification. A mechanical component’s specification is generally complete: all of the conditions in which the component should function and the component’s behavior in each environment can be specified. This means that compliance can usually be checked using finite element analysis software tools, and example components can be built and subjected to their intended loads. Components implemented using neural network methods, on the other hand, usually are expected to function in a complex environment that is too large to fully enumerate. The training methods use a number of example cases, and induce from those examples an implementation that should properly generalize to all, or enough, real cases. The compliance of the component therefore cannot be completely verified, but must be done statistically.
11.3 Divide and conquer: the component breakdown structure
The component approach involves breaking down the system into unitary component parts, in order to make each part manageable by a person. However, different people use different levels of abstraction to understand the parts of the system.
In practice, people divide up a system first into major subsystems, and those into smaller components, and so on until the components are simple enough to deal with. This recursive division defines components at varying levels of abstraction: the electrical power system as a whole, with the power storage, power distribution, and power generation components as parts of the overall power system.
Figure 11.1 shows an (intentionally) partial breakdown structure for a spacecraft, illustrating how the spacecraft as a whole (the “space segment” of the whole system) is organized into multiple trees of components.
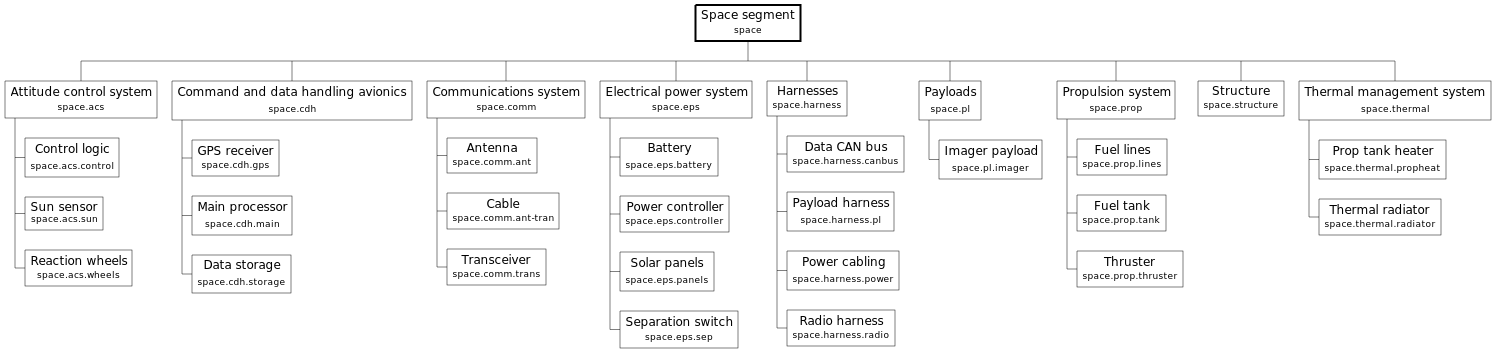
This recursive division creates a tree-structured component breakdown structure of the parts of the system. The breakdown structure organizes components in a way that helps people find components, including both finding a specific component that they are looking for and discovering related components that they do not already know about. The structure also defines levels of abstraction that allow people working at different system levels to focus their attention.
The relationship between a component and its parent is often called a part-of relationship. (This relationship is how the breakdown structure is encoded into the system artifacts graph; see Chapter 15.)
The breakdown structure organizes components, but it does not define the system structure, which I will discuss in the next chapter. The system structure defines how components interact with each other, which generally crosses different parts of the breakdown structure tree.
The system and high-level components should be broken down into subcomponents that have a strong internal relatedness and weaker relationships between subcomponents, as I discussed earlier. In doing so, the high-level component provides an abstraction of its subcomponents. This usually means breaking into subcomponents either by function or physical location. Most people think first of dividing by function: the electrical system, the hydraulic system, the communication system. Location is often more implicit. For example, a space flight mission is organized first by ground system, launch system, and flight system (physical locations) and then by function in each location.
A system will not necessarily have a single optimal breakdown structure. When that happens, one must pick some approach and stick with it. Some systems will have lower-level components that contribute to multiple high-level functions. If the system is organized according to the high-level functions, then the low-level components could fit into multiple branches of the hierarchy. I will discuss this further in the next chapter , when I cover how one uses hierarchy to organize the structure of the system.
Keeping components together that are functionally related is important. Part of the purpose of the hierarchy is to help designers and implementers: the hierarchy should guide them toward the information they need and should not hide or lead them away from that information. I have worked on some projects where the team decided to consider the esthetics of the hierarchy and tried to balance the depth of branches. While the resulting hierarchy was easier to draw, actually using the organization became more complex and error-prone. High-level components no longer provided an abstraction of a collection of subcomponents as a whole. Instead, the collection of related subcomponents was split between two or three high-level components; nowhere was the one abstraction of the whole set represented. Building specifications, tests, and project plans became harder because related things were no longer related in the hierarchy.
11.4 Component characteristics
Each system component is defined by a number of characteristics. These characteristics define an external view of the component: information about the component that can be observed without knowledge of how the component is designed internally. The characteristics constrain the component’s internal design, but should only include those aspects that will affect how the component fits with other components to make up the system.
There are six kinds of characteristics in the component model used in this book:
- Form
- State
- Actions or behaviors
- Interfaces
- Other non-functional properties
- Environment
Form. The “shape” of the component. The component does not typically change its form over time. For physical components, form is obvious: the geometry of the volume or area that the component occupies. Form might include the material of which a physical component is made. For electronic or data components, form is how it is packaged: a data file in some format, or a software component in the form of an executable application.
Examples include:
- The geometry of an aircraft wing rib (which roughly matches the shape of the wing’s airfoil)
- The length and diameter (or gauge) of copper wire carrying an electrical current
- The library format used for a software package
State. This is the mutable “condition” of the component at a particular point in time. More formally, state is the information that is necessary and sufficient to encapsulate the past history of the component, so that any reaction that the component performs to some input is fully determined by the input and the state. State can be discrete (such as binary-encoded digital data) or continuous (such as the angle and angular momentum of a rigid body at a point in time).
Practical examples include:
- The value of a digital memory register
- The heat stored in a solid object
- The angle of a control knob that is connected to a rheostat
- The velocity and rotation rates of a rigid body moving in space
- The wear on a bearing connecting a rotating object to a non-rotating one
- The altitude of an aircraft
Actions or behaviors. These are the state changes that the component can perform. Some behaviors are reactive, meaning they are initiated by some input. Other behaviors are continuing, meaning that they continue to be performed without further input.
Examples of reactive behaviors:
- Incrementing a memory value in response to a sequence of program instructions
- Starting current flow in a circuit in response to closing a switch
- Changing the temperature of a component as heat is applied to an interface
- Changing the rotation speed of a rigid body in response to applied torque
Examples of continuing behaviors:
- Steady change of the rotation angle of a rigid body at its rotation rate, given no external torque applied to change the rotation rate state
Interfaces. These are the ways in which a component is connected to other components in the external world, and is the only way for to observe the component’s behavior from outside. Inputs can be given to a component, and output can be received from it. Inputs and outputs create a causal relationship between actions in one component and another. Inputs trigger reactive behaviors in the component that receives the input. Outputs can be a result of a reactive behavior, or an observation of a continuing behavior. Outputs are the only way another component can observe information about a component.
Examples of inputs:
- A digital message received over a network or I/O port
- The changing of an electrical switch position from open to closed or vice versa
- Heat received by contact with another component, or by radiation from another component
- Force transmitted across a contact with another component
- Movement of a user interface control by a user
Examples of outputs:
- A digital message sent over a network or I/O port
- Electrical current or voltage from a generating component
- A visual observation of the angle of a rotating rigid object
- An alarm sound played to alert a user
- Ongoing sound and vibration that a person uses to monitor a component’s function
Non-functional properties. Components often have some properties that do not change over time (or change very slowly). These properties are not state per se, but they create important constraints on the component’s design and implementation and affect how the component should behave.
Some non-functional properties:
- Mean time to some type of failure
- Minimum or maximum capacity (in liters or amp-hours)
Environment. A component is also characterized by the expected environment in which the component will operate. This can be viewed formally as part of the component’s interface, but in practical terms it is useful to call it out separately. The environment specification typically includes information like the storage and operating temperature range, humidity, atmosphere, gravitation or acceleration, electronic signal environment, or radiation.
Section 36.5 details more about components and how to specify them.
11.4.1 Characteristics and hierarchy
A high-level component provides an abstraction for the subcomponents that make it up. This implies that each of the characteristics of a high-level component—its form, state, behaviors, and so on—needs to be reflected in the subcomponents. For example, if the high-level component has some state A, then one or more of its subcomponents must have some state that, when aggregated, implements A. If the high level component has form B, then the subcomponents when put together must have that same shape.
Consider a radio communications component. The purpose of the component is to send and receive data packets with another radio somewhere else. The radio component has interfaces to communicate data with another local component, an interface to emit and receive RF signals, and other interfaces for control, configuration, power, and heat transfer. This example radio component, similar to those that might be used on a small spacecraft, has an antenna that is initially retracted but can be deployed on command.

The radio is built of a number of subcomponents. These subcomponents must implement the state of the radio overall, as well as all its interfaces. The diagram below shows a simplified possible implementation.

The set of subcomponents implements each of the interfaces named in the high-level radio component. Many of them are provided by the transceiver component, but the antenna handles the RF signal sending and receiving.
The state of the high-level radio is divided over the subcomponents. Again, much of the state is contained in the transceiver component, as it performs the data manipulation. The deployment state is a physical property of the antenna: it is either retracted or extended.
In the example implementation, however, there are multiple powered components—the sensor and actuator related to deploying the antenna in addition to the transceiver. This results in a more complex power state than defined in the higher-level radio component: some of the components could be powered on while others could be powered off, rather than a binary on/off overall state. During design, discrepancies like this should lead to improving the specification of the state of the high-level component.
11.5 Downsides
As I have noted, breaking a system into separate and independent components benefits the people who need to understand the components. This advantage generally outweighs other considerations, but there are downsides to this approach.
The first downside is that a reductive approach doesn’t allow for many kinds of system optimization. Having two separate components means that the two are not jointly optimized.
Software language compilers illustrate this. If each program statement is considered independent, the compiler translates each statement into a block of low-level machine code. However, optimizing compilers break this independence, and gain large speed improvements in the generated code. For example, a code optimizer can detect when two statements perform redundant computations and merge them. An optimizer can detect that a repeated computation (in a loop, for example) can be moved out of the loop and performed only once.
Software optimizers allow a developer to write understandable code, and it performs optimizations that can be proven to maintain correctness but that make the resulting machine code hard for a person to understand and verify. There remains the possibility of system optimizers that perform similar translations, but they are not generally available today.
The second downside is that breaking a system into many components creates an organizational problem: how does one name or find a particular part? A hierarchical component breakdown can help organize the pieces.
11.6 Why components matter
One splits complex systems into component parts in order to make parts that are understandable by the people who have to work on the parts. The approach also makes it easier to manage parallel design, implementation, and verification of the parts. If one wants to acquire a component from an outside source, having a definition of what the component is helps the acquisition process.
Each of the people working on the system needs information to work on their parts. Defining a component provides a locus around which to organize the information related to a component. Having a model of what a component is provides a basis for designing artifacts that will contain the right information.
Different people will need to work at different levels of abstraction in the system. Organizing the components hierarchically provides these different levels of abstraction.
The people working on the system need to find pieces of the system, both when they are looking for information about a specific piece and when they are trying to learn what the pieces are. The hierarchical structure provides a way to name and find information about a component, and provides a structured index to help people browse and discover.
Finally, it is generally understood that the structure of a system is related to the structure of the team that builds it [Conway68]. I discuss this further in Chapters 19 and 57.